Modification of the perception pipeline: new available sensors!
During this last year, we have completely modified the perception process to improve its performance. Indeed, the detection errors were […]

ARPON
Autonomous Robotic Platform for Orchard Navigation
During this last year, we have completely modified the perception process to improve its performance. Indeed, the detection errors were […]

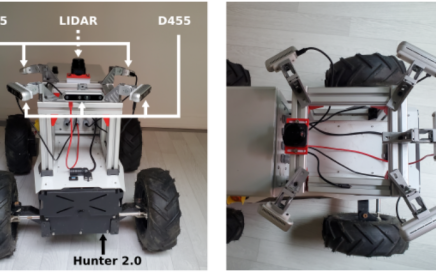
The first tests with our new AgileX Hunter 2.0 robots have been conducted in CEFEL orchards located near Montauban, close […]

Two new AgileX Hunter 2.0 robots are available in LAAS-CNRS, one of them being funded thanks to ANR. They are […]