
Final results: the proof of concept is fulfilled!
Our project is ending on 2024 August 31st. We are pleased to share our latest experimental results conducted in CEFEL […]

Autonomous Robotic Platform for Orchard Navigation
Our project is ending on 2024 August 31st. We are pleased to share our latest experimental results conducted in CEFEL […]

The ARPON project has been presented to MSc students from different universities (Cork, Coimbra, Ostfalia, Toulouse). The talk took place […]
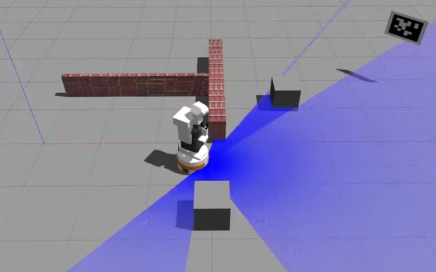
During this last year, we have completely modified the perception process to improve its performance. Indeed, the detection errors were […]

Our paper entitled ‘A GNSS-free navigation strategy for orchards‘ has been accepted in SBI Agro 2023, the Brazilian congress dedicated […]

Two papers have been accepted by both Brazilian and French teams to the 20th IEEE Latin American Robotics Symposium (LARS). […]

Our paper entitled “Multi-camera GPS-free Nonlinear Model Predictive Control Strategy to Traverse Orchards” has been accepted for publication in the […]

The ARPON project was presented during a seminar dedicated to agricultural robotics and its role in the transition towards agroecological […]

We have participated to the Ag. Robotics Forum, World FIRA 2023. It was held near Toulouse, in the Agrobiopole, from […]

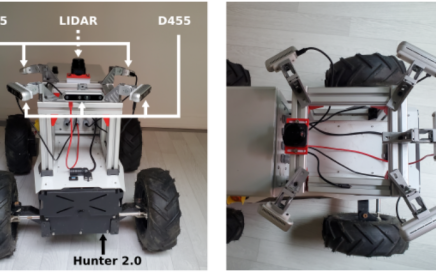
Our Hunter 2.0 robot has managed to sequence several row following and U-turns in the orchards using only the four […]
Preliminary works about the avoidance strategy to be used in orchards have just been accepted for publication in the 19th […]