
Final results: the proof of concept is fulfilled!
Our project is ending on 2024 August 31st. We are pleased to share our latest experimental results conducted in CEFEL […]

ARPON
Autonomous Robotic Platform for Orchard Navigation
This category groups articles which show the work progress and highlight some intermediate nice results.
Our project is ending on 2024 August 31st. We are pleased to share our latest experimental results conducted in CEFEL […]

Two papers have been accepted by both Brazilian and French teams to the 20th IEEE Latin American Robotics Symposium (LARS). […]

We have participated to the Ag. Robotics Forum, World FIRA 2023. It was held near Toulouse, in the Agrobiopole, from […]

Our Hunter 2.0 robot has managed to sequence several row following and U-turns in the orchards using only the four […]
Preliminary works about the avoidance strategy to be used in orchards have just been accepted for publication in the 19th […]
Our first paper has been accepted at the IEEE/ASME international conference on Advanced Intelligent Mechatronics (AIM). It will take place […]

Alexandre, an internship student from UPSSITECH/SRI has been hired in CNRS-LAAS. From 2020 April to July, he worked on the […]
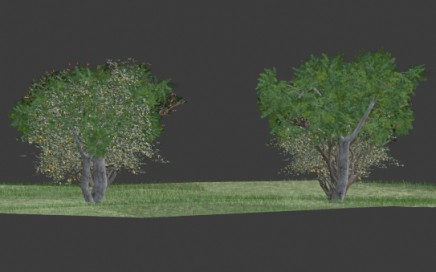
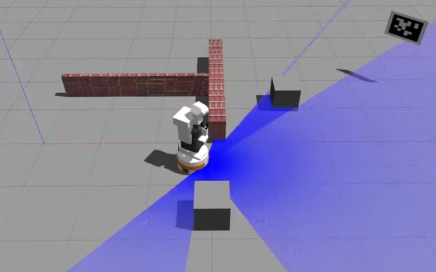
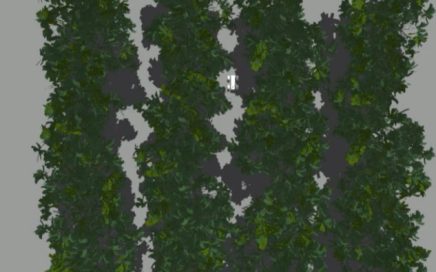
A first ROS simulator has been designed. It includes a 3D representation of different fruit trees and an AgileX Hunter […]