
During this last year, we have completely modified the perception process to improve its performance. Indeed, the detection errors were at the core of the residual oscillations that can be seen in our first results (see here). First, we have replaced our detection algorithm based on 3D data only, with a pipeline based on YOLO plus a particle filter to:
- use both 2D and 3D data provided by the camera
- enable tracking in addition to detection
To do so, we decided to improve the equipment of our robot, adding:
- One Intel RealSense RGBD D455 camera in front to get more data and prepare the future obstacle detection process
- One GPU Xavier Nx 64 Go to improve the computation capacity
You can see here the evolution of the robot equipment during the project:
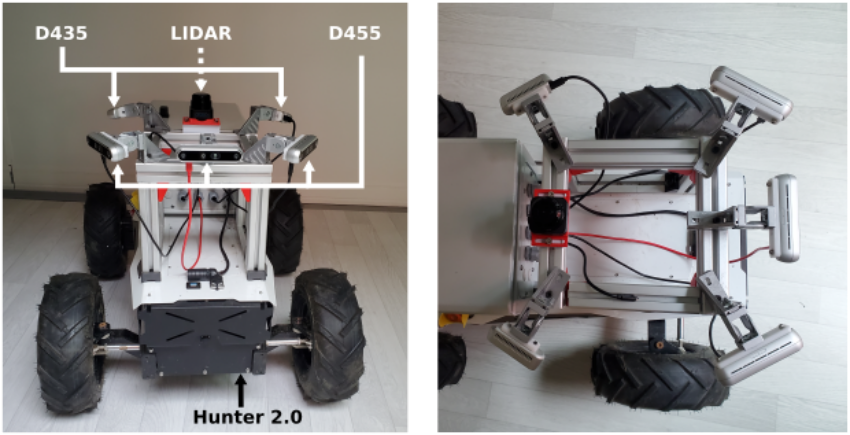
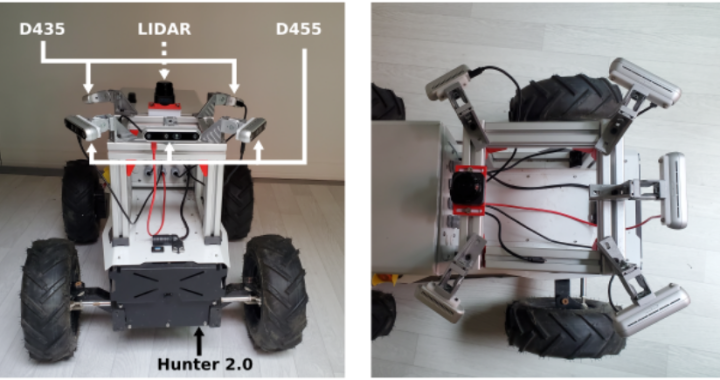
The final equipment (2024): 5 cameras, one LIDAR (right: topview).
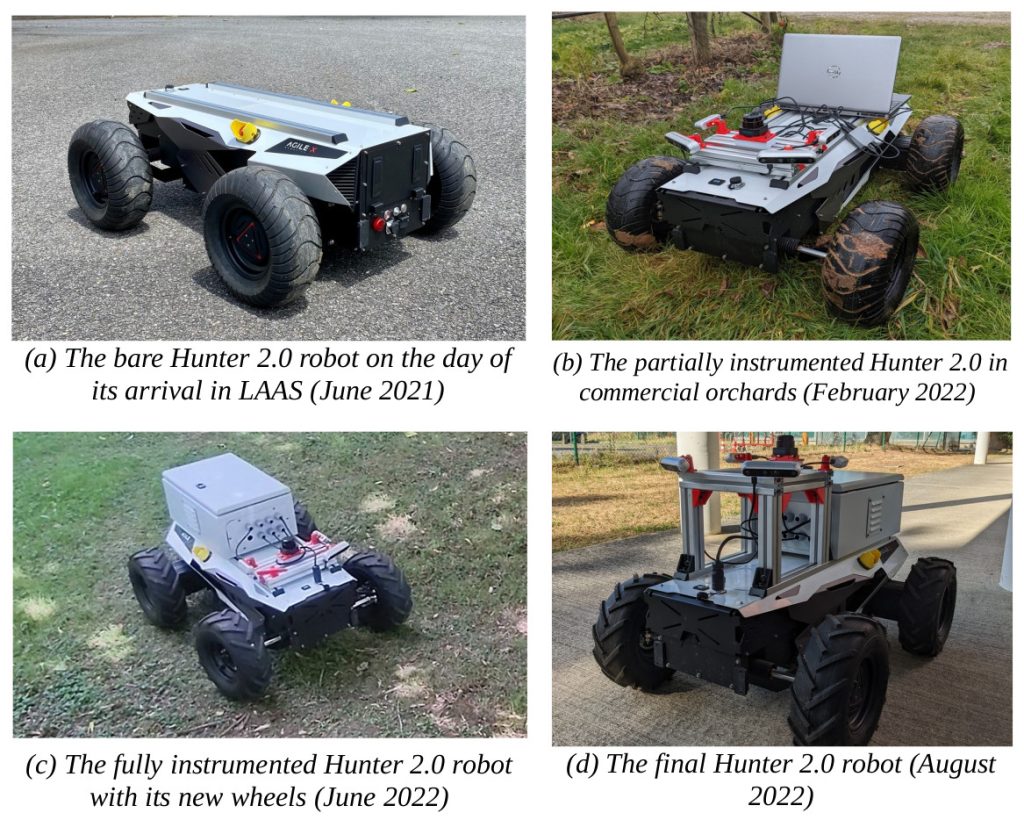
The robot equipment evolution between 2021 and 2023.