
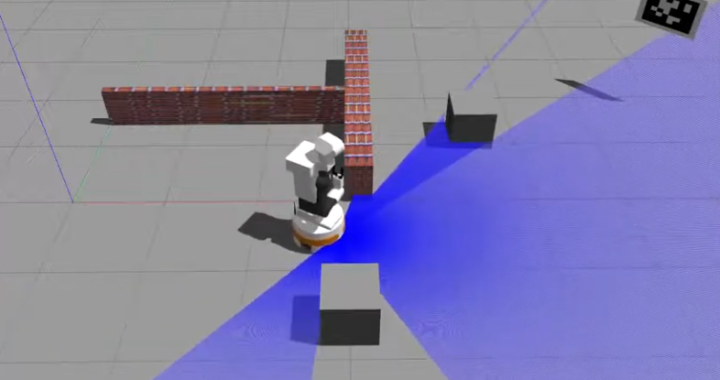
Preliminary works about the avoidance strategy to be used in orchards have just been accepted for publication in the 19th IEEE Latin American Robotics Symposium (LARS 2022). The conference, which is one of the most important in Latin America for robotics, will take place in Sao Paulo in mid-October 2022. The proposed strategy presents a stand-alone reactive obstacle avoidance controller for image-based navigation. It is intended to pave the way towards the design of an efficient avoidance strategy in orchards. It has been validated using ROS/Gazebo in environments cluttered with several static obstacles. The next steps include the introduction of an anticipative controller, the capacity to deal with dynamic obstacles and the extension to the particular case of orchards. The paper is available here.
Stand-alone obstacle avoidance controller for image-based navigation. Adrien Durand-Petiteville , Viviane Cadenat , Thierry Sentenac. 19th IEEE Latin American Robotics Symposium (LARS 2022), Sao Paulo, October 2022.