
A first ROS simulator has been designed. It includes a 3D representation of different fruit trees and an AgileX Hunter 2.0 robot model. This latter is the robot which has been selected for the project. Both partners will use the simulator to test and evaluate all the methods which will be developed to fulfil the project objectives.
- Fruit trees in the orchard

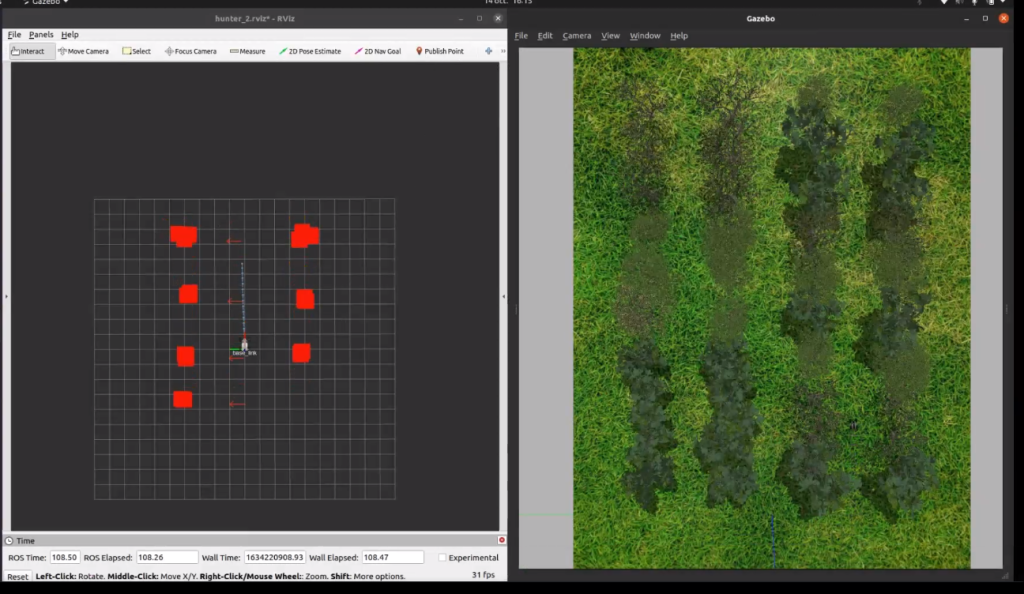
- Visualization of Hunter 2.0 robot following a row using rviz (left) and corresponding orchard top view using Gazebo (right)
- The robot in the orchard

