Le projet IPaTRo, qu’est-ce que c’est ?

Ce projet se situe dans le champ de la robotique sociale (Lambert et al. 2020, Sheridan, 2020). Les robots sociaux sont conçus spécifiquement pour des situations d’interactions avec les humains. L’apport croisé de la robotique (et plus spécifiquement de l’interaction humain-robot), de l’informatique (et plus spécifiquement de l’interaction humain-machine), de la psychologie et de l’ergonomie cognitive (facteurs humains) permettra des avancées pour traiter les questions spécifiques de ce champ (acceptabilité, interaction et communication).
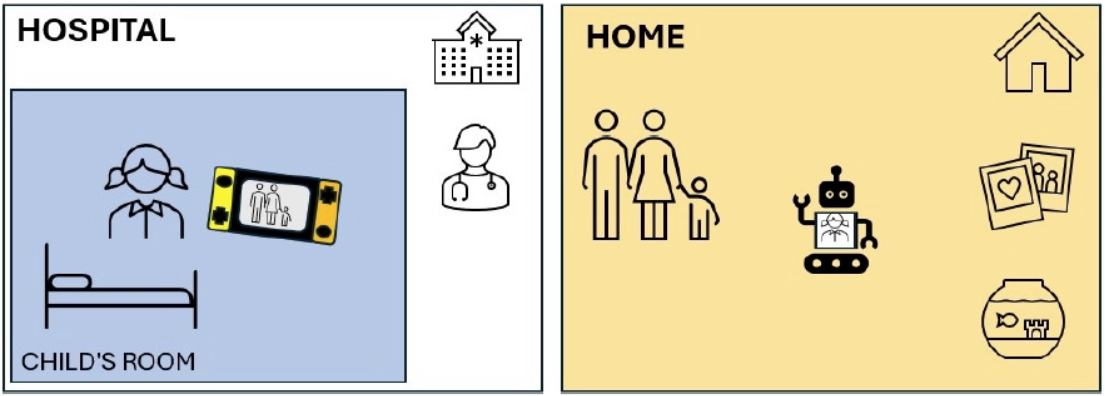
Ce projet se focalise sur la situation d’interaction via l’utilisation d’un robot de téléprésence dans un contexte d’usage spécifique : celui des enfants hospitalisés. L’objectif est de construire un paradigme pour l’interaction dans ces situations. Les robots de téléprésence sont utilisés dans différentes situations pour permettre à des personnes isolées, de façon ponctuelle ou permanente, de participer à des interactions sociales (Zhang et Hansen, 2020).
L’objectif est donc d’une part d’analyser et modéliser la situation d’interaction en téléprésence dans le contexte de la santé (robot de téléprésence pour enfants hospitalisés) pour en déterminer les éléments les plus pertinents pour créer le sentiment de présence et une interaction réussie se traduisant par une bonne acceptabilité et expérience utilisateur, et d’autre part de créer un prototype de dispositif de médiation de l’interaction simple et adaptable et de le tester auprès des utilisateurs.